Проект CompMechLab® по созданию программного модуля прогнозирования параметров движения беспилотного наземного транспортного средства для интеллектуальной системы управления получил поддержку Фонда содействия инновациям

01 декабря 2016 года итоги конкурса «Развитие-НТИ» утверждены протоколом Дирекции Фонда содействия развитию малых форм предприятий в научно-технической сфере. Компания ООО Лаборатория «Вычислительная механика» (CompMechLab®) участвовала в конкурсе с заявкой по теме «Разработка программного модуля прогнозирования параметров движения беспилотного наземного транспортного средства для интеллектуальной системы управления». Заявленный проект был высоко оценен экспертами Фонда и рабочей группы АвтоНет Национальной технологической инициативы (НТИ) и рекомендован к поддержке.
Проект направлен на создание программного модуля прогнозирования параметров устойчивости, управляемости и динамики движения при исполнении управляющих сигналов, поступающих от интеллектуальных систем, в зависимости от состояния дорожного покрытия, текущих параметров движения и технических характеристик транспортного средства. Использование такого модуля в составе интеллектуальных систем управления позволит улучшить возможности эффективного и безопасного применения беспилотных и других транспортных средств с интеллектуальными системами на дорогах общего пользования. Заинтересованность в использовании результатов проекта выразила компания Cognitive Technologies.
 |
 |
|
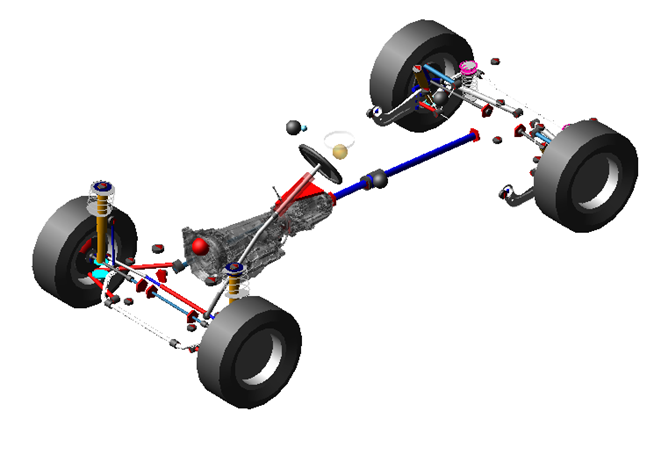
Расчетная математическая многомассовая |
MBS-модель подвески автомобиля |
Входными данными разрабатываемого модуля являются количественные характеристики управляющих сигналов рулевого управления, торможения, управления дроссельной заслонкой (газ), данные оценки состояния дорожного полотна, текущее состояние транспортного средства. Модуль на основе входных данных определяет прогнозируемые ускорение и скорость по окончании маневра по трем направлениям, углы и угловые скорости рыскания, крена, тангажа, сила реакции в пятне контакта колеса с дорогой. Модуль будет адаптироваться для использования на транспортных средствах трех классов: грузовые, легковые и предназначенные для перевозки пассажиров (автобусы).
Разработка модуля планируется на основе компьютерного моделирования динамики поведения автомобиля при заданных входных данных с помощью математической многомассовой (MBS) модели, учитывающей все специфические особенности транспортного средства. Для обеспечения возможности адаптации конечного продукта проекта под различные виды транспортных средств будет разработана полностью параметрическая CAD (Computer-Aided Design) - MBD (Multi-Body Dynamics) модель.
Для уточнения данных о настройках подвески, изменяющихся по сравнению с заводскими вследствие эксплуатации и сервисного обслуживания, в рамках проекта будет предложен метод калибровки модуля на основе комплекса калибровочных маневров и анализа поведения транспортного средства по данным датчиков и компьютерного зрения. По результатам калибровки может оцениваться и пригодность транспортного средства к дальнейшей эксплуатации.
По оценкам рабочей группы «АвтоНет» Национальной технологической инициативы, рынок частично и полностью беспилотных автотранспортных средств и комплексных решений и услуг на их основе к 2035 году достигнет 3 трлн. долл. По данным консалтинговой компании Lux Research, объем рынка программного обеспечения для беспилотных автомобилей в настоящее время оценивается в 0,5 млрд. долл. в 2014 году и по прогнозам достигнет объема 25 млрд. долл. к 2030 году.
Существующие программные продукты в данной отрасли основаны на обучении искусственного интеллекта, управляющего автомобилем:
- с помощью загрузки больших объемов фото- и видеоинформации о дорожных ситуациях, обработанных автоматизированным способом и снабженных аннотациями;
- с помощью виртуального полигона, имитирующего на основе полномасштабных моделей автомобилей с высоким уровнем адекватности реальным конструкциям и реальным ситуациям значительно более полный объем всевозможных дорожных ситуаций.
Реализации первого подхода отличается высокими временными затратами и требует привлечение большого числа специалистов. Так, в компании Mobileye, занимавшейся разработкой программного обеспечения автопилота для автомобилей Tesla, в обработке изображений вручную было задействованы свыше 600 штатных специалистов.
Виртуальный полигон существенно сокращает время обучения искусственного интеллекта и позволяет также моделировать редковстречающиеся, маловероятные и опасные дорожные ситуации., в том числе с большим количеством участников. Наиболее важным комонентом виртуального полигона является модуль, отвечающий за математическое и компьютерное моделирование поведения транспортного средства в различных ситуациях. В мире существует несколько специализированных программных систем, функционально близких к продукту проекта. Вместе с тем не было выявлено случаев применения этих или аналогичных решений непосредственно в составе интеллектуальных систем управления.
К числу компаний, занимающихся разработкой беспилотных транспортных средств, потенциально заинтересованных в применении функционала разрабатываемого модуля, относятся: Apple, Audi, Baidu, BMW, Bosch, DAF, Daimler, Iveco, MAN, Scania, Volvo, Ford, General Motors и другие. В продукте также могут быть заинтересованы разработчики систем искусственного интеллекта для беспилотного транспорта. В России лидером по разработке таких систем является компания Cognitive Technologies. В мире наиболее известна компания Mobileye. Безусловно, продукт может представлять интерес для стартапов, занимающихся аналогичными разработками в интересах ведущих автопроизводителей.
Идет загрузка следующего нового материала
Это был последний самый новый материал в разделе "Новости членов Ассоциации"
Материалов нет