Магнитные мышцы для роботов держат вес в 1000 раз больше собственного
Исследование опубликовано в журнале Nature Communications.
Исследователи из Ульсанского национального института науки и технологий (UNIST) в Южной Корее разработали магнитную композитную искусственную мышцу. Она способна выдерживать растягивающие нагрузки, которые в 1000 раз превышают ее собственный вес. Кроме того, их жесткость в 2700 раз превышает жесткость традиционных материалов.
Исследователи объединили ферромагнитные частицы и полимеры с памятью формы, чтобы создать новый тип мягких искусственных мышц. Ферромагнитные частицы реагируют на внешние магнитные поля, придавая мышцам силу, а полимеры с памятью формы позволяют им быстро менять форму и жесткость.
Специальная обработка поверхности обеспечивает прочную связь между двумя компонентами: это усиливает механические свойства композита и обеспечивает быструю реакцию на изменение магнитного поля. В результате эти искусственные мышцы могут изменять свою жесткость в 2700 раз и становиться в 8 раз мягче.
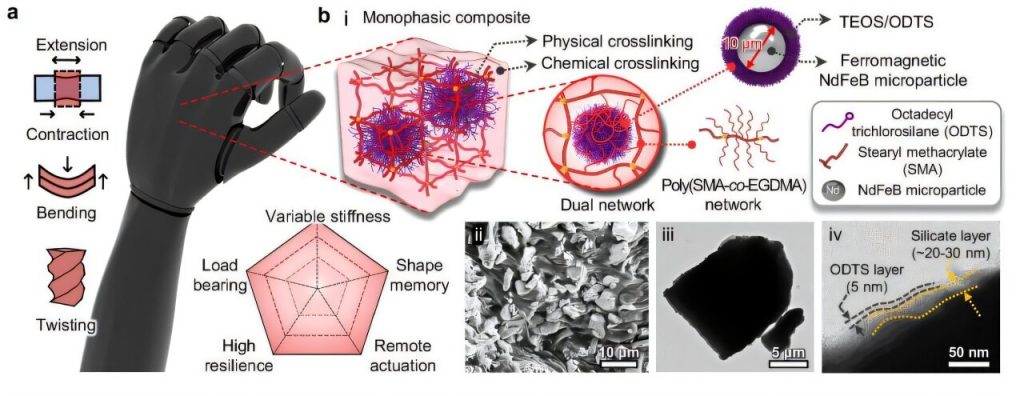
Кроме того, мышцы способны выдерживать огромные нагрузки — растяжение с силой в 1000 раз больше их веса и сжимающие в 3690 раз. При этом их энергетическая эффективность достигает 90,9%. Для улучшения контроля над мышцами и снижения вибраций исследователи добавили гидрогелевый демпфирующий слой. Это обеспечивает точное управление мышцами даже при высоких скоростях.
Исследование открывает возможности для инновационных применений в различных секторах, реализуя механические свойства и производительность, превосходящие возможности существующих искусственных мышц.
Используя методы мультистимуляции, включая лазерный нагрев и управление магнитным полем, мы можем дистанционно выполнять такие фундаментальные движения, как удлинение, сокращение, изгиб и кручение, а также более сложные действия, такие как точное манипулирование объектами
Хун Ый Чонг, руководитель исследования
Разработчики считают, что мышцы можно будет использовать в робототехнике, носимых устройствах и других областях, требующих высокопроизводительных и гибких приводов.
Дополнительная информация
- Автор: Александр Шереметьев
- Источник: Хайтек
Идет загрузка следующего нового материала
Это был последний самый новый материал в разделе "Технологии"
Материалов нет