Инженеры случайно открыли материал, который при нагревании деформируется и стремительно выстреливает вверх на высоту, которая в 200 раз превышает его толщину. Исследование опубликовано в журнале Science Advances.
Инженеры из университета Колорадо в Боулдере и Калифорнийского технологического института (Калтех) разработали необычный пластиковый материал. При нагревании он изгибается и прыгает вверх как кузнечик без дополнительных внешних воздействий. Разработку можно использовать для создания прыгучих мягких роботов.
Исследователи изучали, как изменяется при нагревании форма жидкокристаллических эластомеров. Это класс материалов, который представляет собой затвердевшую и эластичную версию жидких кристаллов. Вместо ожидаемого изменения формы, во время эксперимента пластинка просто подпрыгнула и упала со стола.
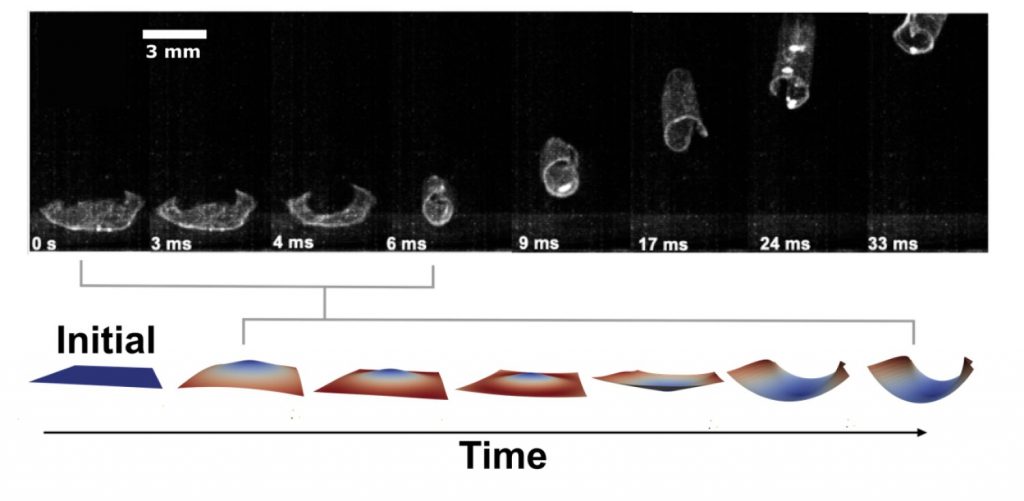
Дальнейший анализ раскрыл причину такого спонтанного движения. Пленка, сопоставимая по толщине с контактной линзой, которая использовалась во время эксперимента состояла из трех слоев. При нагревании два верхних слоя сжимаются быстрее, чем нижний. В результате пленка постепенно деформируется, стремясь принять форму конуса.
По мере роста напряжения материала этот конус переворачивается, ударяется о поверхность и резко поднимается в воздух. В серии экспериментов исследователи показали, что всего за 6 мс пленка поднимается вверх на высоту в 200 раз больше собственной толщины. Инженеры также установили, что, управляя структурой материала, его можно заставить прыгать при охлаждении, а не нагревании и направлять в нужную сторону.
Авторы разработки полагают, что по мере развития эту технологию можно будет использовать для управления движениями и прыжками мягких и гибких роботов.
Дополнительная информация
- Автор: Александр Шереметьев
- Источник: Хайтек
Идет загрузка следующего нового материала
Это был последний самый новый материал в разделе "Технологии"
Материалов нет