Шум вместо топлива: как работают информационные двигатели и зачем они нужны
Когда речь идет о шуме, считается, что он только вредит. Даже информационным двигателям. Теперь ученые попробовали обратить вред себе на пользу. «Хайтек» рассказывает, что из этого получилось.
Слишком много фонового шума обычно мешает работе. Но физики сделали что-то невероятное: разработали микродвигатель из стеклянных шариков, который не только противостоит влиянию отвлекающего фактора, но и использует его для эффективной работы. Об их эксперименте сообщается в журнале Physical Review Letters и в блоге Института фундаментальных вопросов FQXi.
Как работают обычные и микроскопические двигатели?
В повседневной жизни люди используют двигатели и моторы, которые потребляют топливо для направленного движения и, таким образом, выполняют полезную работу. В микроскопическом мире все сложнее. Там шум в виде тепла может все испортить.
Тепловой шум в окружающей среде заставляет компоненты небольших машин «все время качаться вперед и назад», объясняют ученые. В итоге, крошечный двигатель работает не так эффективно, как мог бы.
А что на счет информационных двигателей?
Существует особое семейство микроскопических машин, известных как информационные двигатели, которые используют шум для целенаправленного движения. Эту информацию они используют, усиливая «правильные» манипуляции машины. Простыми словами, информационный двигатель — это машина, которая преобразует информацию в работу.
Физикам и инженерам пригодятся такие крошечные двигатели для разработки новых микроскопических машин для нанотехнологических приложений. Главное, их разработать, чтобы они заменили обычные машины.
Авторы нового исследования продвинулись в этой работе. Они больше узнали о том, как информацию можно использовать в биомолекулярных машинах.
Что сделали ученые?
Ученые построили информационный двигатель, используя микроскопические стеклянные шарики размером с бактерию, взвешенные в воде. Шарик свободно удерживается на месте лазерным лучом, который действует как опора под ним. При этом, молекулы воды мягко толкают шарик из-за естественных тепловых колебаний в жидкости. Время от времени он «трясется».
И вот в чем хитрость: когда шарик поднимается против силы тяжести из-за тепловых колебаний, то меняется и положение опоры для лазера. В этом положении у шарика больше накопленной или гравитационной потенциальной энергии. Как у мяча, который готовится упасть.
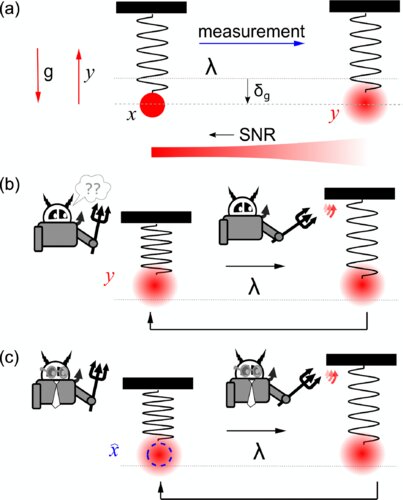
точке x. Механизм, основанный либо на (b) зашумленном измерении положения y, либо (c) на байесовской оценке положения X̂ (синий пунктирный круг). Авторы и права: Physical Review Letters (2022). DOI: 10.1103/PhysRevLett.129.130601
Ученым даже не пришлось «поднимать» объект; это происходило естественным образом, благодаря колебаниям молекул воды. Таким образом, двигатель преобразовал тепло воды в накопленную гравитационную потенциальную энергию, используя обратную связь о движении шарика для настройки лазерной ловушки. «Решение о том, следует ли поднимать ловушку и насколько, зависит от информации, которую мы собираем о положении бусины. Она действует как “топливо” для двигателя», — объясняют ученые.
В чем сложность?
Так и работает система, но правильно реализовать эту стратегию сложно, если в системе слишком много шума измерения. Его создает яркость лазерного луча, который используют для обнаружения шарика. В таких случаях неопределенность его положения для каждого измерения может быть больше, чем движения объекта, вызванные колеблющимися молекулами воды. В итоге, измерительный шум приводит к ошибочной обратной связи и, тем самым, снижает производительность.
Типичные информационные механизмы используют алгоритмы обратной связи, которые основывают решения на последнем измерении положения шарика. Но они могут быть неверными, когда ошибки измерения слишком велики. Ученые как раз хотели выяснить, есть ли способ обойти эту проблему.
Есть ли решение?
Они разработали алгоритм обратной связи, который основывается не просто на прямом измерении последнего положения шарика (оно может быть неточным), а на всех предыдущих измерениях. Таким образом, этот алгоритм фильтрации учитывает ошибки измерения при выполнении байесовской оценки.
В математической статистике и теории принятия решений байесовская оценка решения — это статистическая оценка, которая минимизирует апостериорное математическое ожидание функции потерь. Проще говоря, она максимизирует апостериорное математическое ожидание функции полезности. Напомним, апостериорная вероятность — условная вероятность случайного события при условии того, что известны апостериорные данные, то есть полученные после какого-либо опыта.
Таким образом, комбинируя множество зашумленных измерений с использованием модели динамики шарика, можно восстановить более точную оценку его истинного положения. Это в разы снизит потери производительности.
«Байесовский» компромисс
В рамках исследования, ученые наглядно показали, что информационный механизм, который применяет обратную связь на основе этих байесовских оценок, работает в разы лучше, чем обычные информационные машины, когда ошибки измерения слишком велики. Большинство типичных информационных двигателей в таком случае просто остановятся.
Это удивило ученых. Когда ошибки измерения превышают критический порог, наивная машина больше не работает как чисто информационная. «Лучшая стратегия для нее — просто опустить руки и ничего не делать», — пишут исследователи. А вот байесовская модель выполняет работу независимо от величины ошибки измерения, хоть и небольшую.
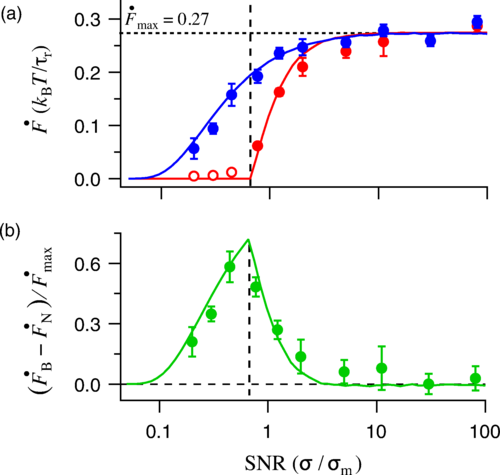
Авторы и права: Physical Review Letters (2022). DOI: 10.1103/PhysRevLett.129.130601
Конечно, за способность байесовского информационного двигателя извлекать энергию даже при больших ошибках измерения приходится «платить». Поскольку такой механизм использует информацию из всех предыдущих измерений, ему требуется больше места для хранения и времени для обработки информации.
И это логично. Минимизация ошибок измерения увеличивает не только работу, извлекаемую из колебаний, но и затраты на обработку информации. В итоге, ученые нашли идеальный баланс — максимальную эффективность при промежуточном уровне ошибки измерения, когда можно достичь хорошего уровня извлечения энергии. При этом, затрат на обработку данных не требуется.
Сейчас ученые исследуют, как на работу двигателя повлияет шум, который возникает не из-за тепла, а от других факторов.
Дополнительная информация
- Автор: Анастасия Никифорова
- Источник: Хайтек
Идет загрузка следующего нового материала
Это был последний самый новый материал в разделе "Технологии"
Материалов нет