Инженеры представили компактный и ловкий роботизированный палец, который выдерживает физическое воздействие.
Исследователи из Харбинского технологического университета разработала компактный роботизированный палец, который сочетает в себе эффективность манипулирования предметами, небольшой размер и устойчивость к внешним воздействиям.
Робототехники по всему миру в течение нескольких десятилетий работают над созданием манипуляторов, которые смогут имитировать ловкость человеческих рук при работе с различными предметами. За это время создано много различных устройств, но недостаток всех этих разработок — хрупкость, объясняют ученые. Случайные воздействия, которые неизбежно происходят в рабочей среде, могут привести к поломке устройства.
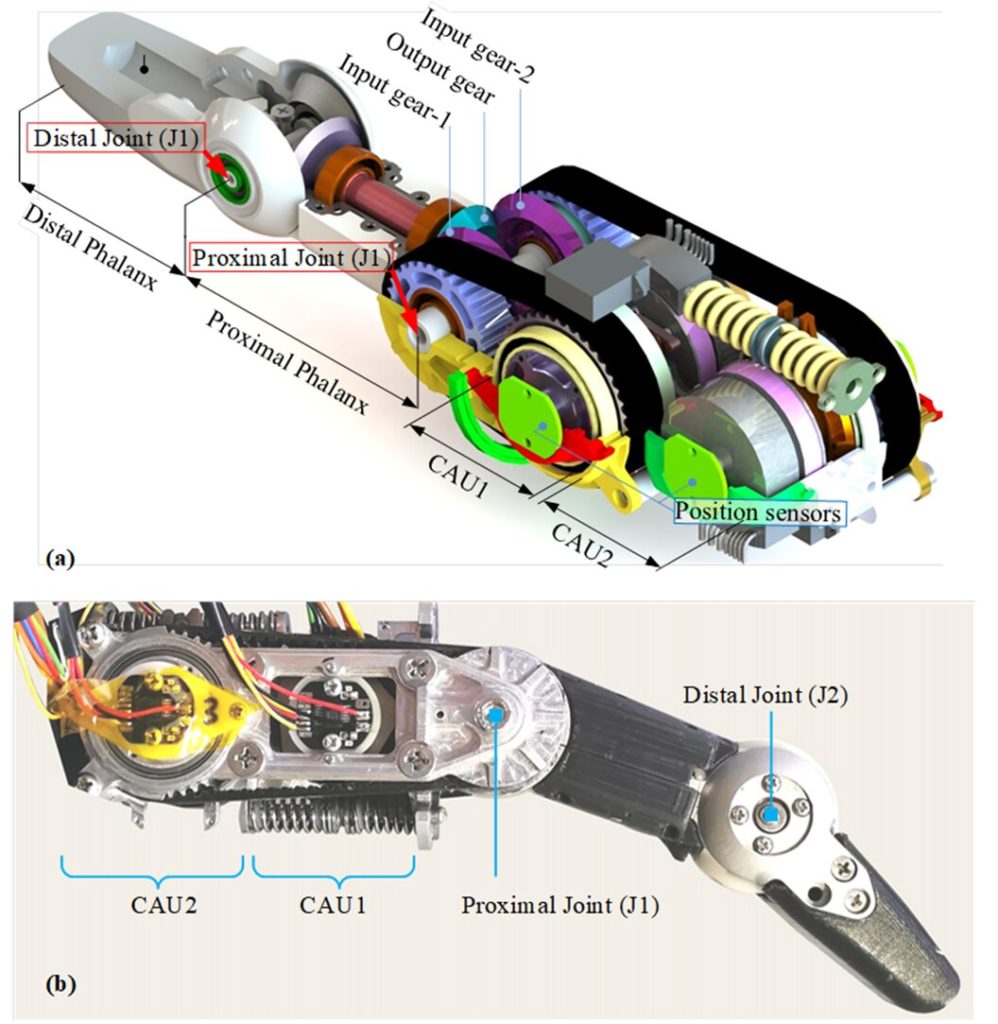
Чтобы преодолеть эти проблемы, инженеры разработали антагонистический пальцевый механизм переменной жесткости. Устройство работает от зубчатой передачи, которая надежнее и проще в производстве и обслуживании, чем современные ловкие руки с тросовым приводом. А принцип работы устройства основан на концепции механической пассивной податливости. Это значит, что контактные силы между роботизированным манипулятором и жесткой средой контролируются, объясняют разработчики.
Механический палец поглощает физические воздействия и может менять свою жесткость в зависимости от выполняемой задачи. Устройство обеспечивает регулируемую функцию жесткости и очень компактную конструкцию без веса и сложности дополнительных приводов. Прототип пальца, разработанный командой, весит 480 г и изготовлен из сплава и 3D-печатного материала.
Инженеры провели серию тестов, чтобы испытать работу манипулятора. Он должен был захватывать предметы различной формы и размера, а также противостоять внешним воздействиям. Исследование показало, что устройство оказалось надежным, обеспечивает необходимую силу и может захватывать и манипулировать предметами.
Авторы продолжат работу по созданию полноценной роботизированной руки, обладающей теми же свойствами.
Дополнительная информация
- Автор: Александр Шереметьев
- Источник: Хайтек
Идет загрузка следующего нового материала
Это был последний самый новый материал в разделе "Технологии"
Материалов нет